Разъем CS-PF07CB для моделей LRWA4, LRPA4, LRXA4Разъем CS-PM04CB для моделей LRPA4 и LRXA4

Увеличить
|
Сервораспределитель позиционирования цилиндра. Модель LRXA4
|
|
|
Сервораспределители позиционирования пневмоцилиндра. Модели LRXA4
|
|
3/3 лин./поз. сервораспределители для регулирования положения пневматического цилиндра
|

|
- Золотник на базе сервопривода, уплотнение металл по металлу;
- Возможность использования внешнего датчика давления;
- Условный проход 4 мм и 6 мм;
- Наличие разъема для подключения ведомого распределителя.
|
|
|
|
|
|
|
|
|
|
|
Описание cервораспределителей
регулирования положения цилиндра
моделей LRXA4
серии LR
|

|
Просмотр в PFD |
|
|
|
|
|
|
|

|
Просмотр в виде книги |
|
|
|
|
|
|
|
|
|
|
Сервораспределители моделей LRXA4 - готовое решение для управления позиционированием пневмоцилиндров. Устройство включает в себя 3-х линейный сервораспределитель, с условным проходом 4 мм или 6 мм, контроллер с обратной связью для позиционирования, регулировки скорости и ускорения пневмоцилиндра.
|
|
В качестве линейной обратной связи должны использоваться потенциометры. Такие системы могут соединяться непосредственно с распределителем модели LRXA. Другие системы управления могут использоваться, если они обеспечивают выходной аналоговый сигнал (0-5V DC) с “плавающей” землей и частотой дискретизации более 1 кГц. Обычно второй сервораспределитель необходим, чтобы управлять второй полостью цилиндра. Распределитель модели LRXA имеет разъем для подключения ведомого распределителя.
|
Общие характеристики сервораспределителей позиционирования пневмоцилиндра. Модели LRXA4:
|
|
Входное напряжение
|
24V DC (пост.тока), +/- 10%, стабилизированный источник питания, макс. потребление 0,8 А, с ведомым распределителем - 1,6 A
|
| Сигнал управления |
0 - 10В (100 кОм); 0 - 20 мA (500 Ом); 4 - 20 мA (500 Ом)
|
| Точность |
определяется обратной связью системы
|
| Дискретный выход |
24V DC, макс. ток 70 мA, открытый коллектор, встроенная защита от КЗ
|
| Выходное питание |
5V DC, макс. ток 10 мA
|
|
Повторяемость
|
ошибка не более 0,3% с оптимальной обратной связью
|
| Среда |
воздух степенью очистки не менее 5 микрон, с маслом или без
|
| Рабочая температура |
0°C - 50°C
|
Максимальный расход
(полностью открыт) |
от 6 Бар до 0 Бар: LRXA4-34 - 550 Нл/мин; LRXA4-36 - 800 Нл/мин
от 6 Бар до 5 Бар: LRXA4-34 - 350 Нл/мин; LRXA4-36 - 550 Нл/мин
|
| Вес |
1000 гр.
|
|
Линейность
|
определяется обратной связью системы
|
|
Рабочее давление
|
0 - 10 Бар
|
| Установка |
В любом положении
|
|
Относит. влажность воздуха
|
не более 90%
|
| Гарантия |
1 год
|
|
|
Кодировка для заказа сервораспределителей позиционирования пневмоцилиндра моделей LRXA4:
|
|
L
|
R
|
X
|
A
|
4
|
-
|
3
|
4
|
-
|
2
|
-
|
2
|
-
|
00
|
|
L
|
Серия
L = пропорциональные сервораспределители |
| R |
Технология:
R = вращающийся |
|
X
|
Версия:
X = управление положением
|
|
A
|
Электроника:
A = аналоговый |
| 4 |
Модель:
4 = на плите
|
|
-
|
|
| 3 |
Функция:
3 = 3-х линейный
|
|
4
|
Условный проход:
4 = 4мм.
6 = 6мм. |
| - |
|
|
2
|
Входной электрический сигнал:
2 = 0 - 10 В
3 = 0 - 20 мA
5 = 4 - 20 мA |
| - |
|
|
4
|
Сигнал обратной связи:
4 = 0 - 5 В (внешний) |
| - |
|
|
00
|
Разъемы (заказывается отдельно):
CS-PF07CB = разъем
CS-PM04CB = разъем
CS-PM07CB = разъем |
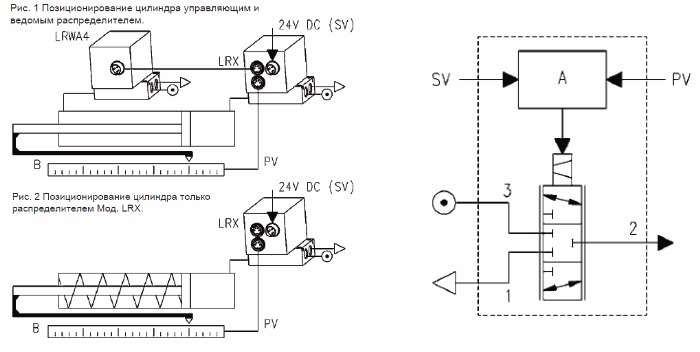
Пневматическая принципиальная схема сервораспределителей позиционирования пневмоцилиндра моделей LRXA4:
|
|
| PV = значение параметра процесса |
B = датчик
| Длина трубок к цилиндру должна быть менее 2 м, условный проход 4 мм или 6 мм. |
| Диаметр цилиндра должен быть выбран таким образом, чтобы иметь запас по усилию, по крайней мере на 30%. |
|
|
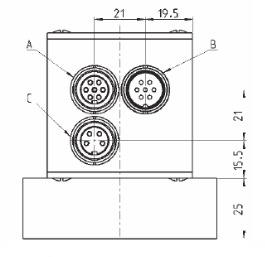
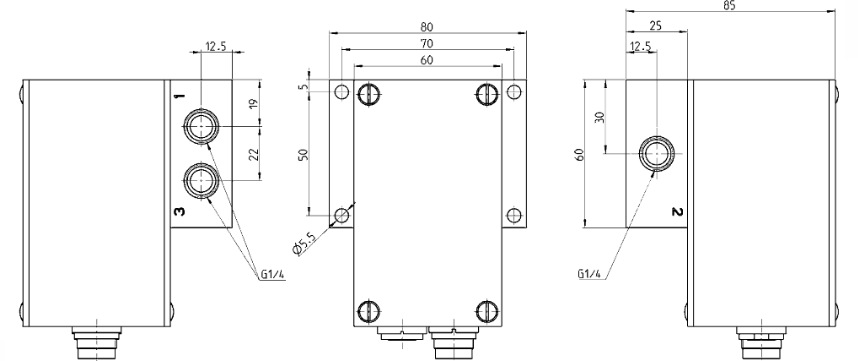
Габаритные размеры сервораспределителей позиционирования пневмоцилиндра моделей LRXA4:
|
A = разъем для ведомого распределителя (7-ми контактный, "мама")
B = подвод напряжения питания (7-ми контактный, "папа")
C = разъем для подключения системы обратной связи (4-х контактный, "мама")
Электрический разъем для подключения системы обратной связи модель CS-PM04CB (4-pin, папа):
|
| Контакт (провод) |
Функция |
Комментарии |
| 1 |
Питание (GND) |
GND потенциометра. Не подсоединять этот контакт к другим контактам GND.
Напряжение на этом контакте ≈ половины напряжения питания. |
| 2 |
Входной сигнал обратной связи |
Выход потенциометра. Если для обратной связи не использовать потенциометр, то сигнал системы обратной связи должен быть 0-5V DC.
Сигнал должен иметь “плавающую” землю. (См. контакт 1) |
| 3 |
Выходное напряжение |
Для потенциометра +5V DC соединять с контактом 1 |
| 4 |
Не используется |
Кабель для обратной связи должен быть экранированный.
Конец экранированного кабеля обратной связи должен быть соединен с металлическим корпусом системы.
Контакт 4 распределителя соединен внутренней связью с корпусом. |
Электрический разъем CS-PF07CB (7-pin, мама) для подключения основного блока:
|
| Контакт (провод) |
Функции |
Комментарии |
| 1 |
Питание +24V DC |
- |
| 2 |
Питание 0V (GND) |
- |
| 3 |
Выходной сигнал |
для ведомого распределителя, ± 5V соединять с контактом 4 |
| 4 |
Общий провод выходного сигнала
(только для ведомого не соединять с другими GND!) |
НИКОГДА не соединять с остальными общими проводами (GND)!!! |
| 5 |
Не используется |
- |
| 6 |
Не используется |
- |
| 7 |
Не используется |
- |
Электрический разъем CS-PM07CB (7-pin, папа) для подключения ведомого блока:
|
| Контакт (провод) |
Функции |
Комментарии |
| 1 |
Питание +24V DC |
- |
| 2 |
Питание 0V (GND) |
- |
| 3 |
Входной управляющий сигнал
(аналоговый вход) |
Диапазон входного сигнала должен соответствовать диапазону обратной связи.
Позиционирование цилиндра происходит всегда непосредственно в соответствии с этим сигналом.
Поэтому качество сигнала должно быть высоким.
Для примера, система обратной связи имеет длину 300 мм, то пульсация 10 мВ командного сигнала
дает погрешность позиционирования +/-0.3 мм !! |
| 4 |
Общий провод управляющего сигнала (GND) |
Контакты 2 и 4 должны быть соединены, если это невозможно напряжение между землями не должно превышать +/- 30V. |
| 5 |
Общий провод аналогового выхода (GND) |
Для ведомого, 0-5V соединять с контактом 4 |
| 6 |
Дискретный выход положения |
24V DC соединеять с контактом 2 |
| 7 |
Выходной сигнал обратной связи
(аналоговый выход) |
0-10V DC соединять с контактом 2, точность +/- 2%, смещение сигнала примерно 150 мВ.
Не использовать этот сигнал для точных измерений. |
|
Обычно отгружается в течение:

|
|
|
|
|
Вас, возможно, заинтересуют следующие товары
|
|